

 联系我们
联系我们


$in[11]为脉冲启动信号;
$in[12]为运行开通信号;
$in[13]为错误确认信号;
$in[14]为驱动装置接通信号;
$in[15]为驱动器关闭信号;
WVIO映射:
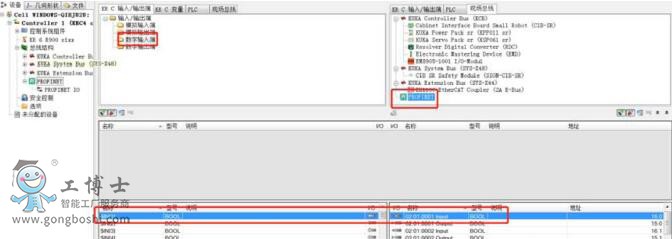
IO映射表:

PLC组态:
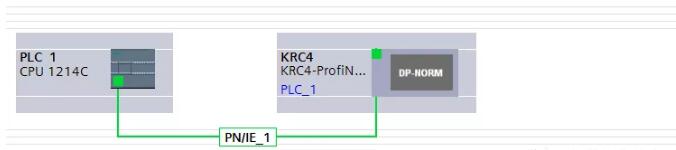

以Profiner通讯协议为例,添加32DI/DO信号,输入地址为 IB60 - 63,输出地址为QB60-63。
PLC程序:
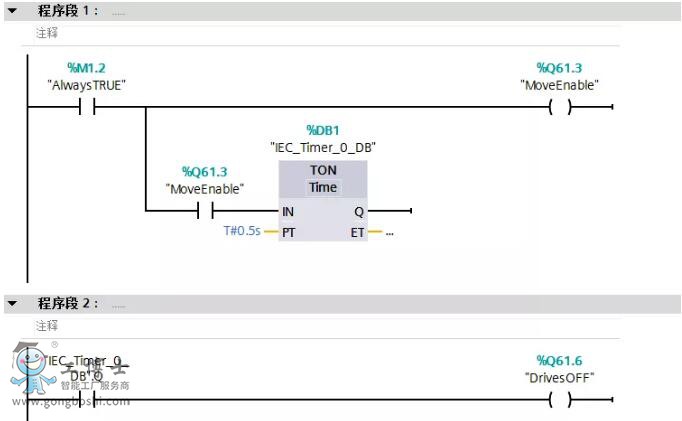
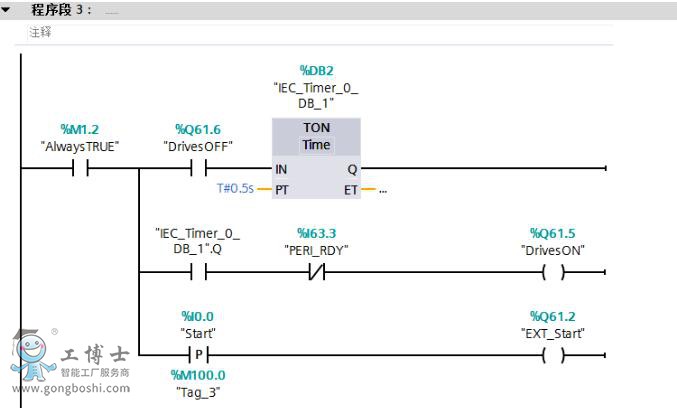
流程简述:切换机器人至EXT模式,PLC一上电就给使能信号,0.5秒以后给出机器人驱动器关闭信号,再过0.5秒给出驱动装置接通信号。当机器人收到驱动装置接通信号以后,会反馈给PLC一个驱动装置处于待机运行状态,此时需要断开机器人驱动装置接通信号。接着按下启动按钮,即可启动机器人。
当所有准备工作做好以后,就可以通过外部按钮来启动机器人了。
注意:此时不可通过机器人示教器上的启动按钮来启动机器人。
来源:网络
更多资讯:库卡机器人
