

 联系我们
联系我们

1. 在主菜单中选择 投入运行 > 测量 > 基坐标 > 3 点。
2. 为待测定的基坐标系选择一个号码并给定一个名称。
3. 选择已经测量过的工具编号。
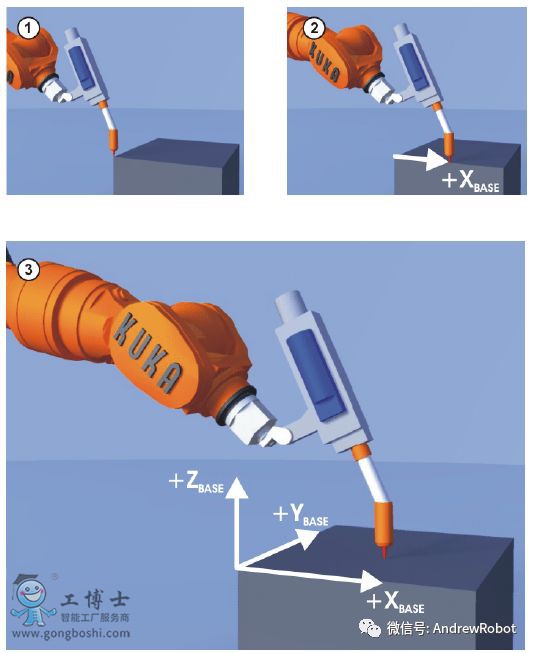
4. 用 TCP 驶至新基座的原点。
5. 将TCP 移至新基座正向 X 轴上一个点。
6. 用 TCP 在 XY 平面接近带正 Y 值一点。
7. 在需要时,可让测量点的坐标和姿态以增量和角度显示(法兰坐标系为基准)。
8. 点击保存。
具体算法可以通过如下KRL程序实现:

来源:网络
更多资讯:库卡机器人
联系热线:18616260662 联系人:王青慧 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 库卡配件服务商
