

 联系我们
联系我们

随着机器人技术的进步,互补传感器技术也在进步。就像人类的五官感觉一样,通过将不同的传感技术结合起来,可在将机器人系统部署到不断变化、不受控制的环境中时取得*佳效果。互补金属氧化物半导体(CMOS) 毫米波(mmWave) 雷达传感器是机器人感知方面一项相对较新的技术。
机器人传感器技术
机器人传感器技术包括力和扭矩传感器、触摸传感器、一维/二维红外(IR) 测距仪、三维飞行时间激光雷达传感器、摄像机、惯性测量单元(IMU)、GPS 等。CMOS 毫米波雷达传感器可**测量其视野范围内物体的距离以及任何障碍物的相对速度。
与基于视觉和激光雷达的传感器相比,毫米波传感 器的一个重要优势是不受雨、尘、烟、雾或霜等环 境条件影响。此外,毫米波传感器可在完全黑暗中 或在阳光直射下工作。这些传感器可直接安装在无 外透镜、通风口或传感器表面的塑料外壳后,非常 坚固耐用,能满足防护等级 (IP) 69K 标准。此外, TI 的毫米波传感器的体积小、重量轻,生产设计 体积是微型激光测距仪的三分之一,重量是其一半[2]。

使用毫米波传感器测量对地速度
**的里程计信息对于机器人平台的自主移动必不可少。
可通过测量机器人平台上车轮或皮带的转动来获得此信息。然而,如果车轮在松散砾石、泥地或湿地等表 面上打滑时,这种低成本方法显然无法轻松凑效。更先进的系统可通过增加一个 IMU(有时通过 GPS 增强)来确保里程计非常**。毫米波感器可通 过向地面发送线性调频信号并测量返回信号的多普 勒频移,为穿越不平坦的地形或底盘俯仰和偏航情况较多的机器人提供额外的里程计信息。
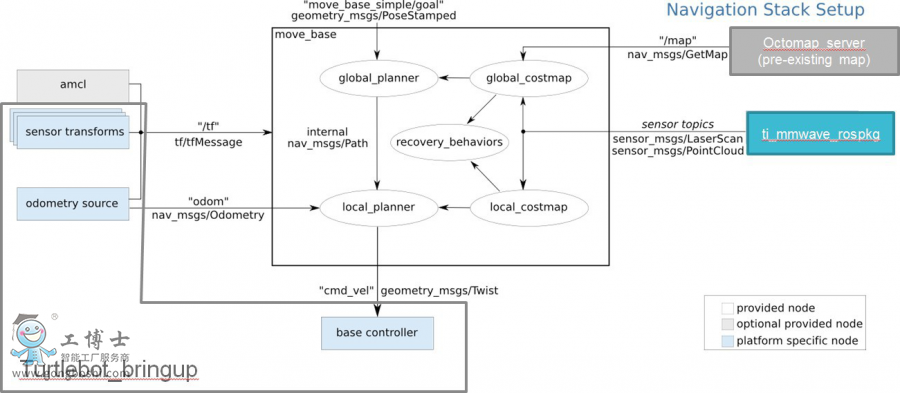
毫米波传感器生成的点云信息
毫米波雷达传感器可通过模数转换器将射频 (RF) 前端模拟数据转换为数字表示形式。这种数字转换的数据需要高速外部数据总线,以将数据流引入处理链,然后经过一系列数学运算对在传感器视野范围内检测到的点生成距离、速度和角度信息。 由于这些系统通常规模较大且成本高昂,因此 TI 试图将所有这些功能集成到一个单片CMOS 器件上, 以减小尺寸,降低成本和功耗。
总之,以下是毫米波传感器与其他技术对比的优势:
o 毫米波传感器对环境条件(如阳光直射、阴影或水的光反射)不敏感。
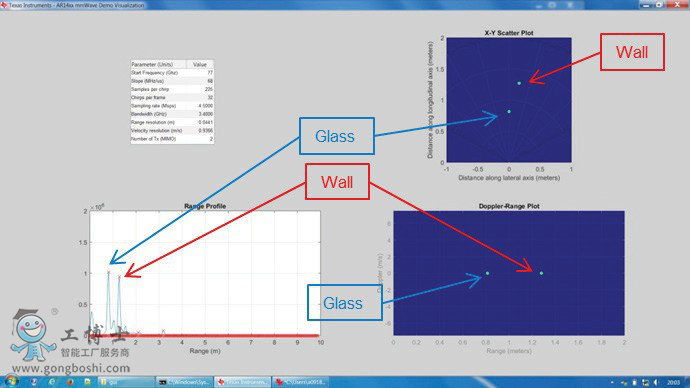
o 毫米波可检测玻璃墙、隔墙和家具,而基于光的传感解决方案则可能无法做到。
o 毫米波提供物体的多普勒速度信息,这在车轮在潮湿表面打滑时有助于增强机器人里程计。
o 基于毫米波的传感器机械复杂度较低,从而减少了制造校准和误差校正过程。没有通风口或透镜,它们可直接安装在塑料外壳后。集成校准意味着在线制造复杂性更低。广阔的视野使得不再需要机械旋转传感器机制。
o TI 的高度集成单片 CMOS 毫米波传感器使所有处理都可在传感器内发生。与基于视觉的系统相比,这降低了材料成本、缩小了尺寸并减少了中央控制器处理器每秒所需的百万条指令。
毫米波传感器技术提高了机器人的智能化操作,同时在实际环境中增强了耐用性。这项技术的应用将进一步加快机器人系统的快速采用。
来源:网络
更多资讯:库卡机器人
- 下一篇:库卡机器人 | 外部轴配置方法
- 上一篇:工业机器人负载设置|KUKA机器人
